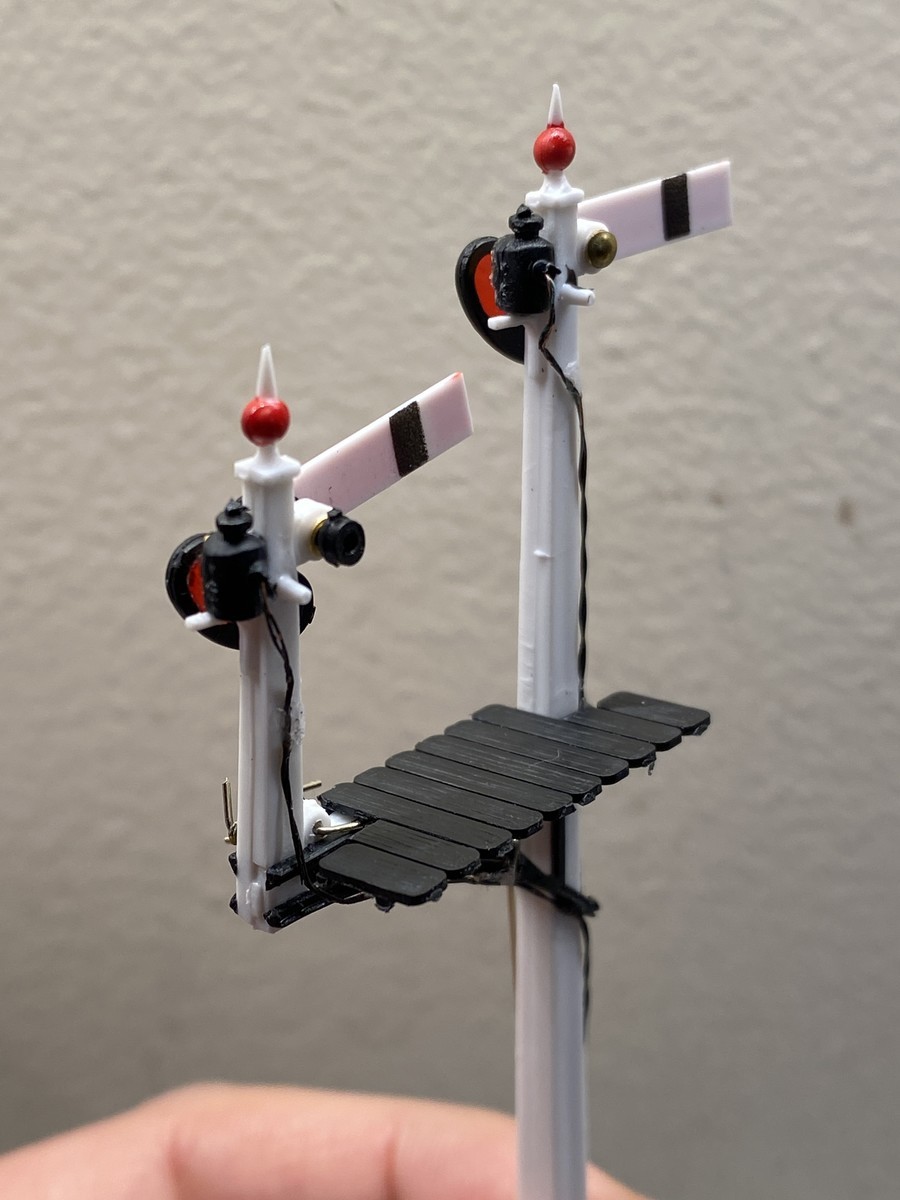
前回は、LEDの組み込みと腕木の可動部分の製作までを行いました。
今回は、組み立てた信号機をレイアウトに据付けてサーボモータで動作させ、完成を目指します。
据付けの準備
まず可動ワイヤの長さの確認です。Home&Distant Signalは説明書の通りにワイヤを短く切ってしまったので、据付けたときにベースボードの下まで届きません。よって、真鍮線を継ぎ足して十分な長さを確保します。
Junction Signalの方は説明書を無視して(笑)長さを残しておいたので、問題なしでした。
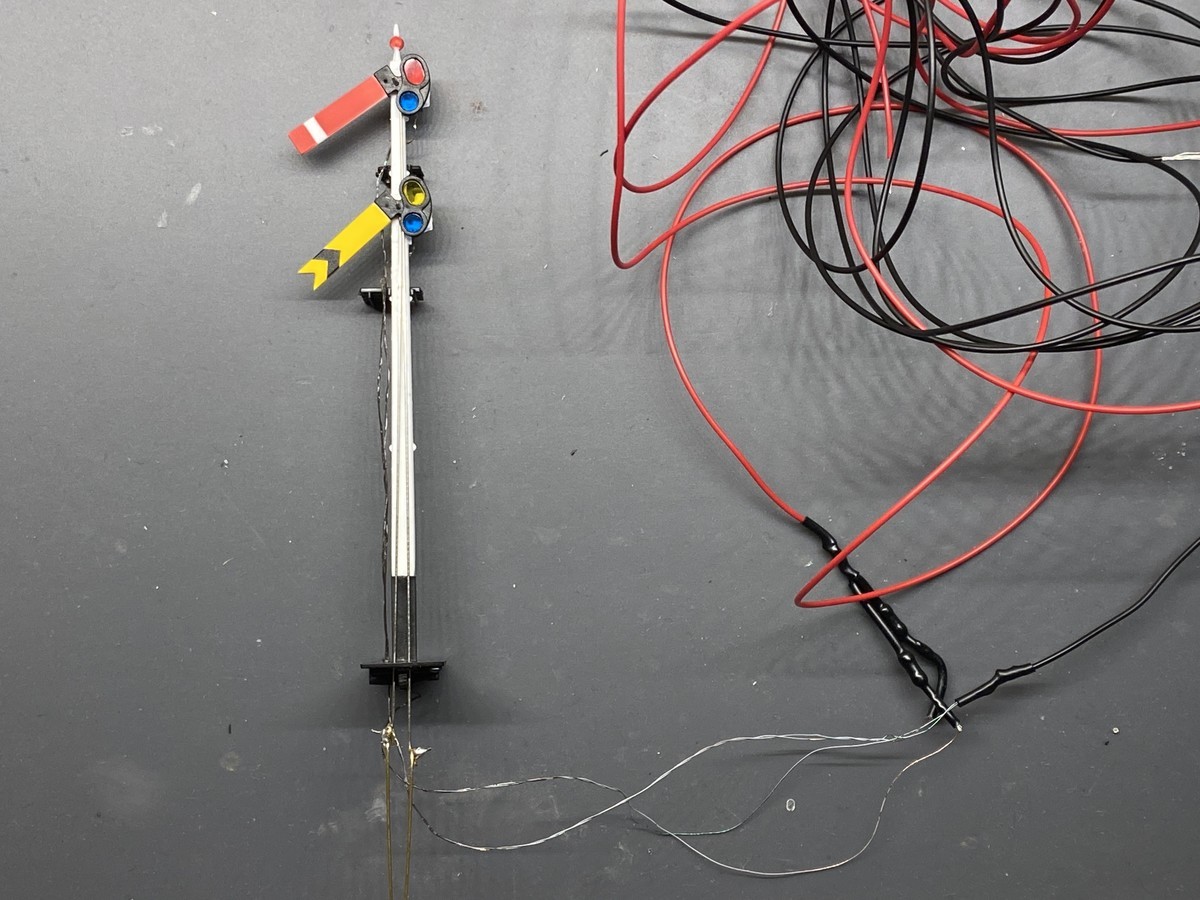
次にLED照明の配線をまとめます。見てくれより機能重視ということで、可動用のワイヤに干渉しないようポストの裏側にまわるように瞬着で固定します。

ポストの根元まで這わせて、同じく可動用ワイヤに干渉しない箇所にピンバイスで穴を開けて、下に逃します。

最後に抵抗を取り付けます。LEDの抵抗を計算するのは実は初挑戦です。
- 電源を12V、LEDによる電圧降下を3Vとして、12(V)-3(V)=9V分を抵抗で賄う
- 15mAまでが許容電流なので、仮に電流を10mAに設定する
- 9Vで10mAの電流を流すための抵抗は、9(V)÷0.01(A)=900Ω
で、若干余裕をみて1KΩの抵抗を付けてみたのですが、明るすぎました。手元に余っていた3.3KΩの抵抗で対応することにしました(それでもまだ明るい)。実際の電流値は
- 9(V)÷3300(Ω)≒0.0027(A)=2.7mA
ぐらい。つまりそんなに電流を流さなくても十分明るくなるということですね... 勉強になりました。

さらに照明用電源までの配線をつないで、熱収縮チューブで絶縁保護して準備完了です。

DSsevo Decoder
今回の腕木式信号機の製作におけるもうひとつの重要なパーツ、それはサーボモータとそれを制御するDCCデコーダです。
サーボモータを制御するDCCデコーダは、ポイントを駆動するためのポイントデコーダが最も身近ですが、ポイント以外の一般用途となると選択肢が限られてきます。
そんな中、日本で多数のDCC対応製品を作っていらっしゃるDesktop StationさんのDSservo Decoderが目に止まりました。

DSservo Decoderもポイントデコーダと書かれていますが、デコーダ基板のみでサーボモータは付属せず、市販のサーボモータを組み合わせて使います。今回のようにレイアウト上のある種のギミックを動かしたい場合、用途に合わせてサーボモータを選んだり、自由に設置できる必要があります。DSservo Decoderは、そんな用途にうってつけでした。
ずっと品切れになっていて2020年10-11月に再生産されるということで心待ちにしていましたが、12月に入ってようやく入荷、販売再開されたので、その日のうちに2セットを購入しました。

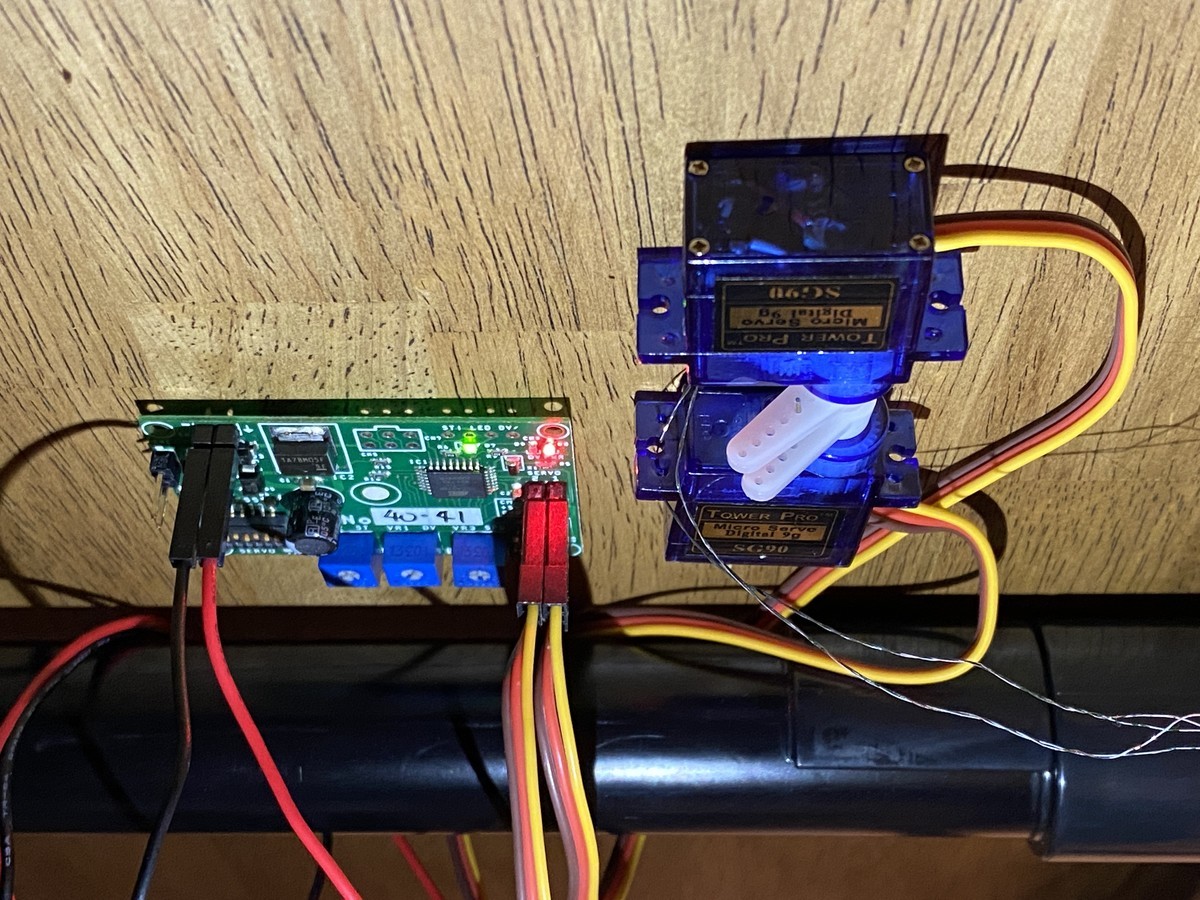
35mm x 50mmのコンパクトな基盤に各インタフェースが整然と配置されています。1つのデコーダに2つまでのサーボモータ(1ch, 2ch)を接続することができます。デコーダーのアドレスも2つ割り当てられ、独立に操作できます。
各チャネルのサーボモータに対しては
- 始点位置
- 終点位置
- 動作スピード
が設定できます。1chは基板上にあるVRにて、2chはCV設定にて行います。DCCデコーダなのでどちらもCV設定でできた方がいいんじゃ... とも思ったのですが、実際に設置してみるとなぜVRを使ってドライバーで設定できるようになっているのか、意味がわかりました(それについては後述、むしろ2chもVRで設定したいぐらい)。
各チャネルに対応するリレー用の制御ピンも用意されていますが、今回は使用していません。
接続するサーボモータは、秋月電子で一番汎用と思われるTowerProのマイクロサーボ9g SG-90を購入しました。

実際にこれらを使ってDSServoでサーボモータを動かすまでですが、非常にわかりやすいです。
- デコーダ(1ch)のアドレスを基板上にあるディプスイッチで設定する(2進数表現)
- DCC入力端子にDCCコマンドステーションの線路出力を接続する
- 1chのサーボモータ端子にサーボモータを接続する(向きに注意!)
- DCCコマンドステーション設定したアドレスに対してアクセサリの操作をする
これでサーボモータが動き始めます。あとは先ほど書いた3つの設定(始点位置、終点位置、動作スピード)について、対応する各VRをドライバでいじるだけです。1chだけ使用するのであればCV設定を全くせずに使うことができます。
2chを使う場合も、アドレスについては1chのアドレス+1になりますので、そのままでよければ設定不要、必要なのは始点位置、終点位置、動作スピードの3つのCV値(CV36-38)だけです。
DCCデコーダなのにCV設定不要がなぜ重要なのか。そもそもアクセサリのデコーダは大量に扱うことが多いので、まず一番重要なアドレスがディップスイッチを見るだけでわかるというのはとても大事だと思います。またサーボモータの設定がVRになっていることについても、VRの方が調整作業が遥かにやりやすいことは明らかです。
例えば以下はVRにて速度調整をしている例です。
ひとしきり用事を済ませてようやく模型のお時間。届いたDSServoに火を入れる。VRでスピード調整するデモ。 pic.twitter.com/65L5nF6Qj4
— じょばんに (@Giovanni_Ihatov) 2020年12月12日
これがCV設定になっていると、
- DCCコマンドステーションをプログラムモードにする
- CV更新
- プログラムモードを抜けて動作確認
- 調整が必要であれば1に戻る
という作業を繰り返すことになります。VRであれば、DCCコマンドステーションをプログラムモードに移行することなく、アクセサリを動作させたままドライバ1本で調整をかけることができます。特にレイアウトに据付けてからの調整は、VRの方が圧倒的に効率的でしょう。
Z21で使うときの注意点
自宅レイアウトで使っているメインのDCCコマンドステーションはZ21なのですが、DSServo DecoderをZ21で使うときの注意点を1つだけ。
Z21 Maintenance Toolにて設定できるRailComの設定をオフにする必要があるようです。具体的には、Settingタブの"activate RailCom"のチェックを外します。

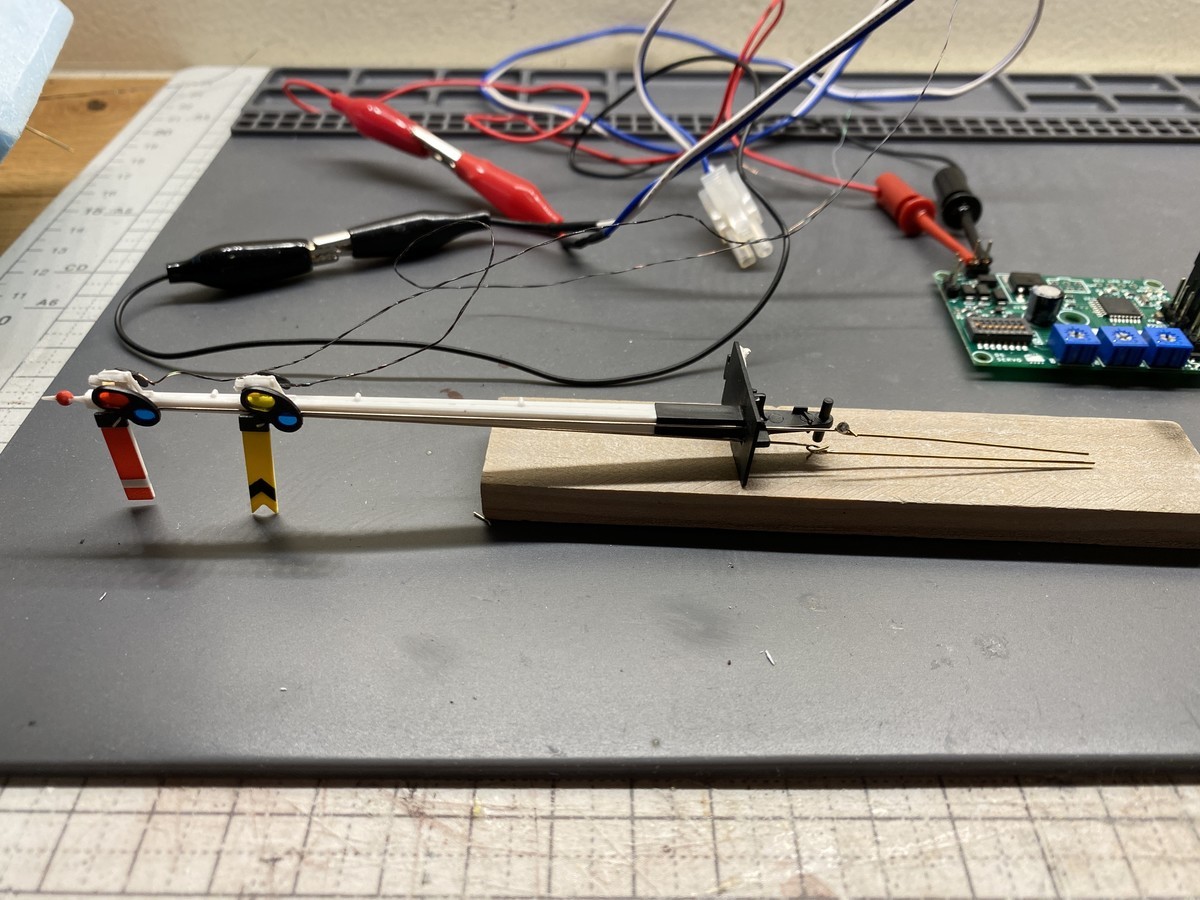
レイアウトでの組み上げ
腕木式信号機本体、サーボモータおよびDCCデコーダの準備ができたところで、作業場所をレイアウト上に移して組み上げていきます。
まずは予定していた設置場所に10mm径の穴を開けます。




次に土台の整備。石粉粘土を使って垂直に立つように調整します。


乾燥したら、塗装します。


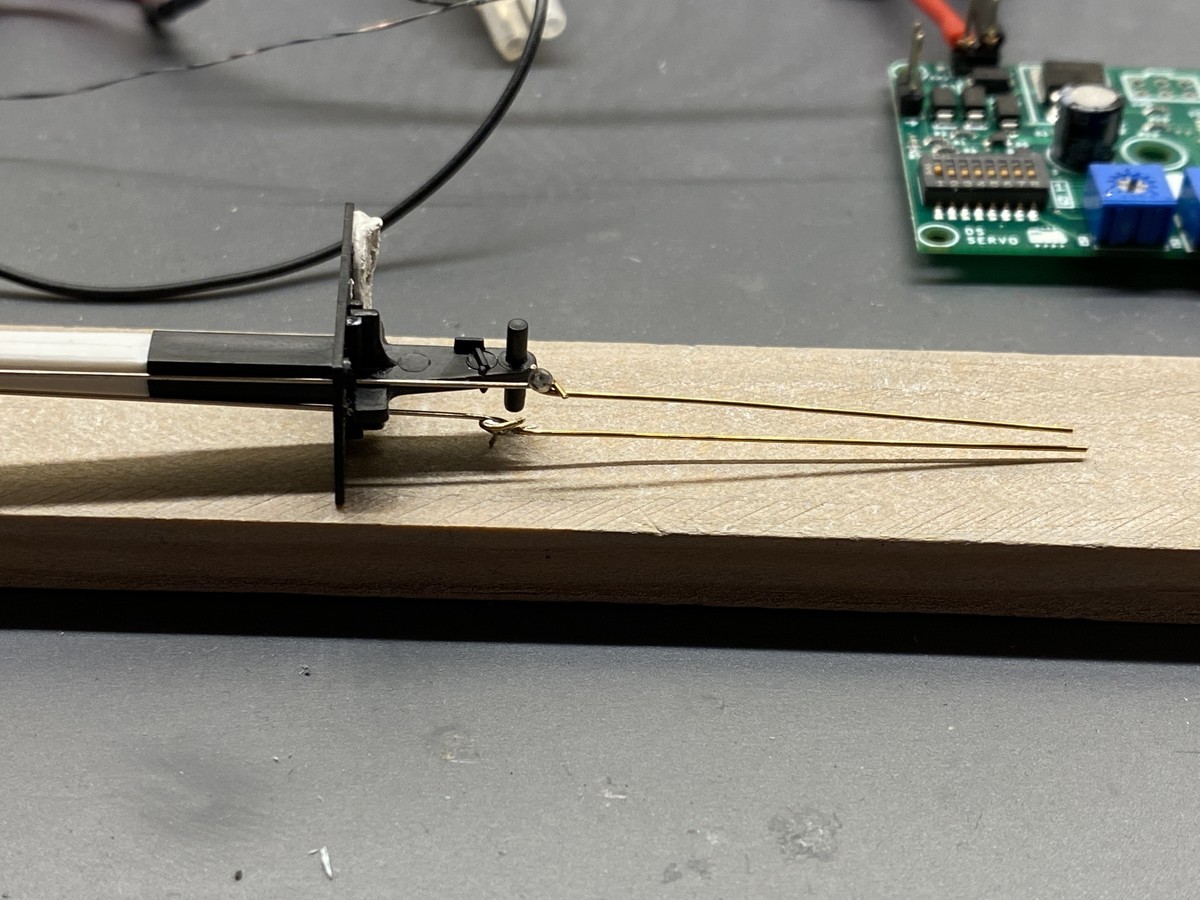
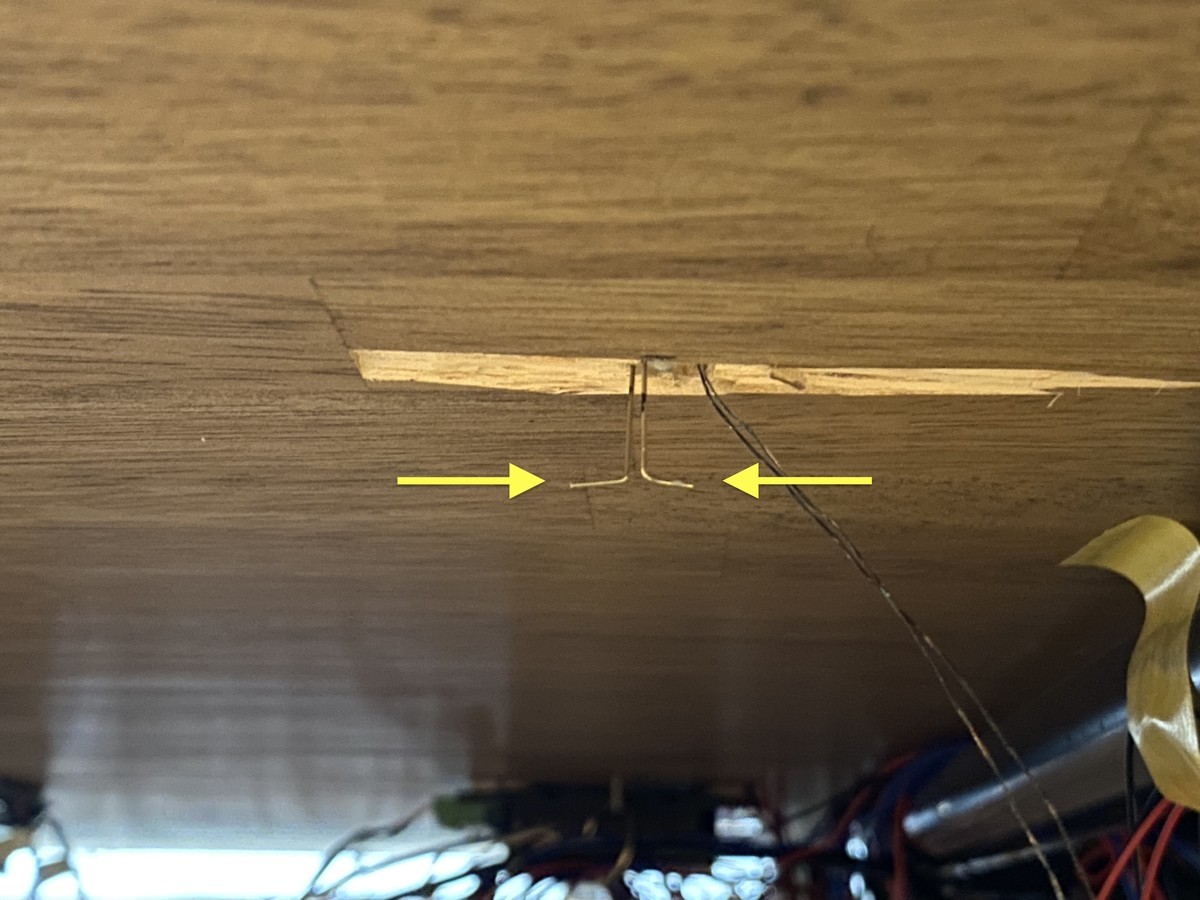
再び据付けたら、可動用ワイヤの先端をL字に曲げて(黄色矢印)サーボモータのアームにひっかけられるようにします。サーボモータの配置を考えて、それぞれ逆向きに曲げてみました。


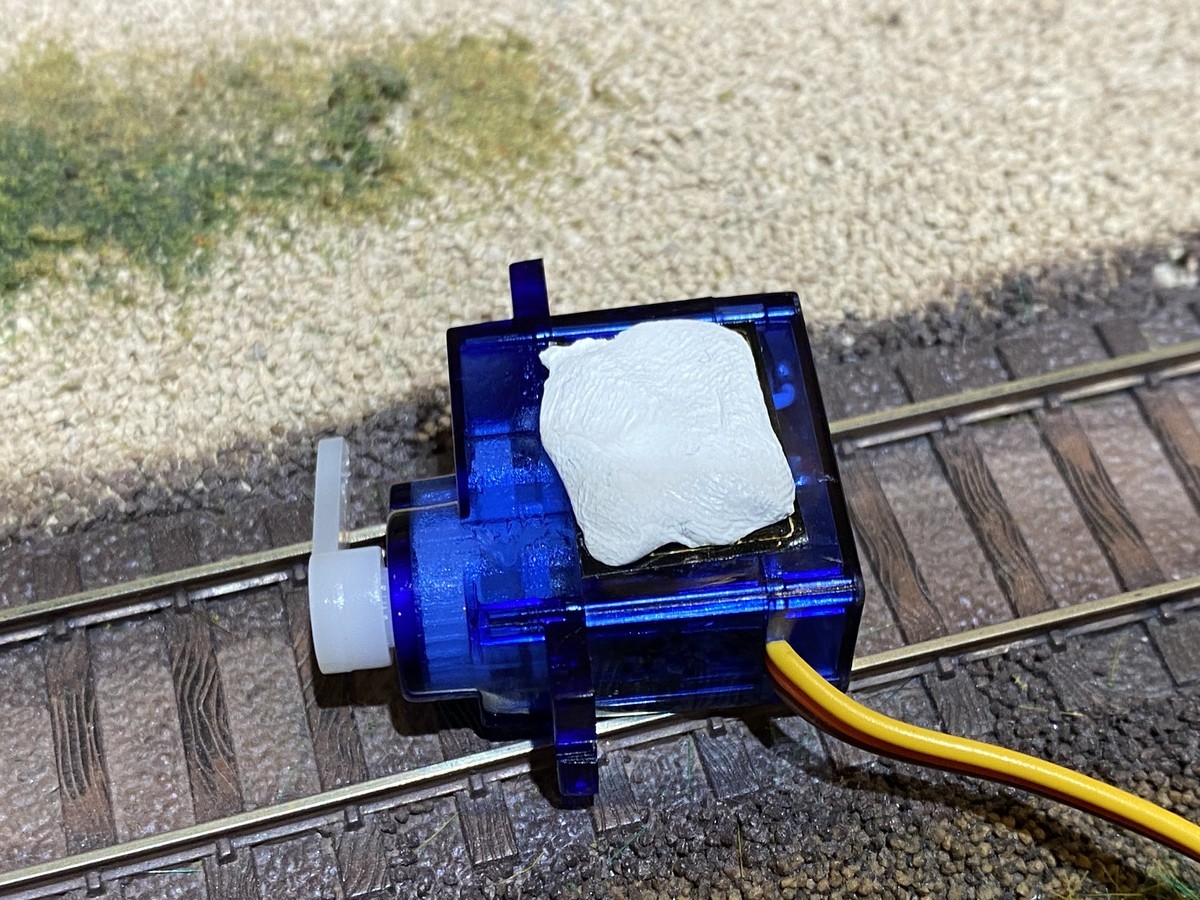
サーボモータにBlu Tackを貼り付けて、先ほどL字に曲げた可動用ワイヤを挟み込むような形で設置します。サーボモータ自体が非常に軽いので、据付けはこの方法が一番楽だと思います。
ここから先ほども触れたサーボモータの3つの設定(始点位置、終点位置、動作スピード)をいじって、きちんと動作するように追い込みをかけます(なので、何度でも言いますが、VRでできた方がはるかによい...)。ともあれ、最終的にここまで来れました。
Now it's working!!🙌🙌🙌😍😍😍 pic.twitter.com/v8TVx0skUI
— じょばんに (@Giovanni_Ihatov) 2020年12月19日
ベースボード下まで見られるように撮ると、こんな感じです。
and how it works. pic.twitter.com/YPnt1DwDkI
— じょばんに (@Giovanni_Ihatov) 2020年12月19日
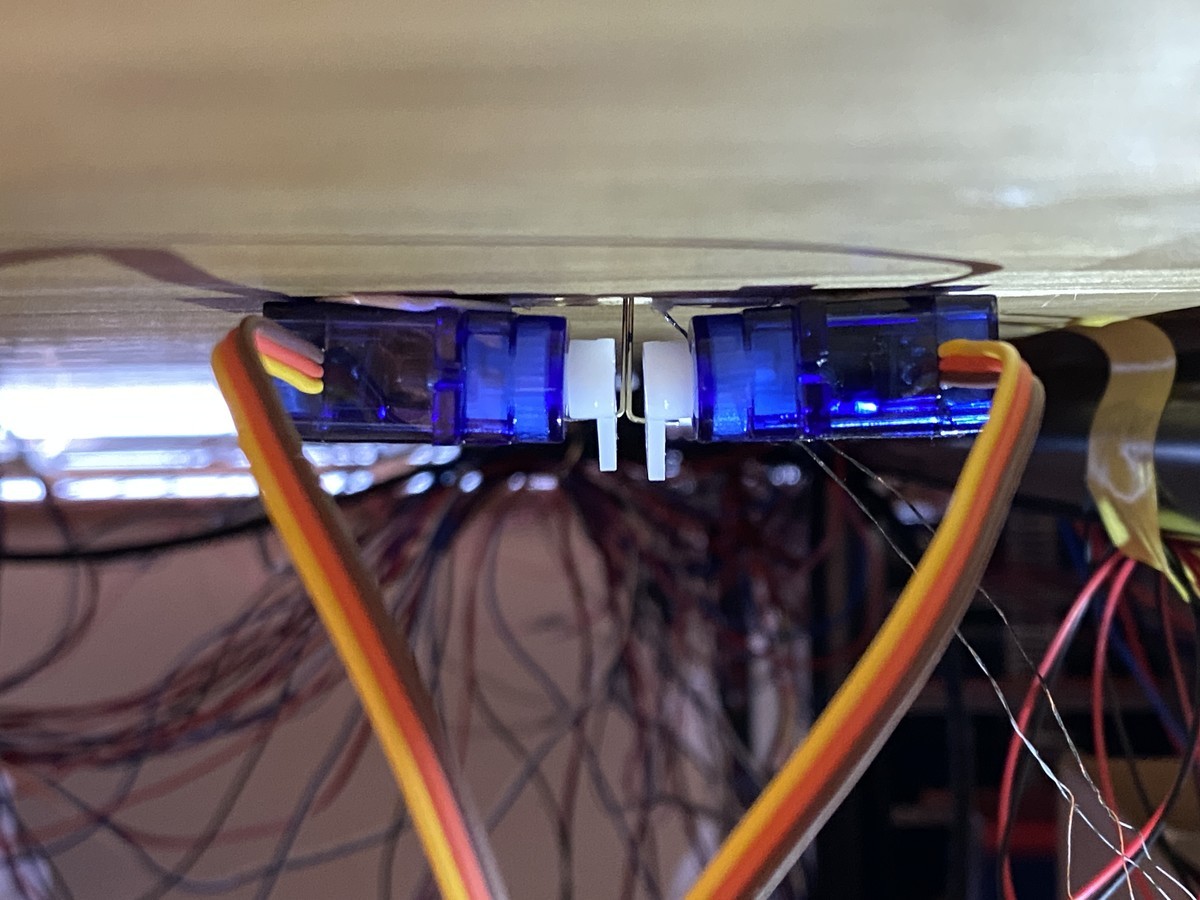
無事調整が済んだら、DSServoの基板もBlu Tackで据付け。完成状態のベースボード裏は以下のような感じです。
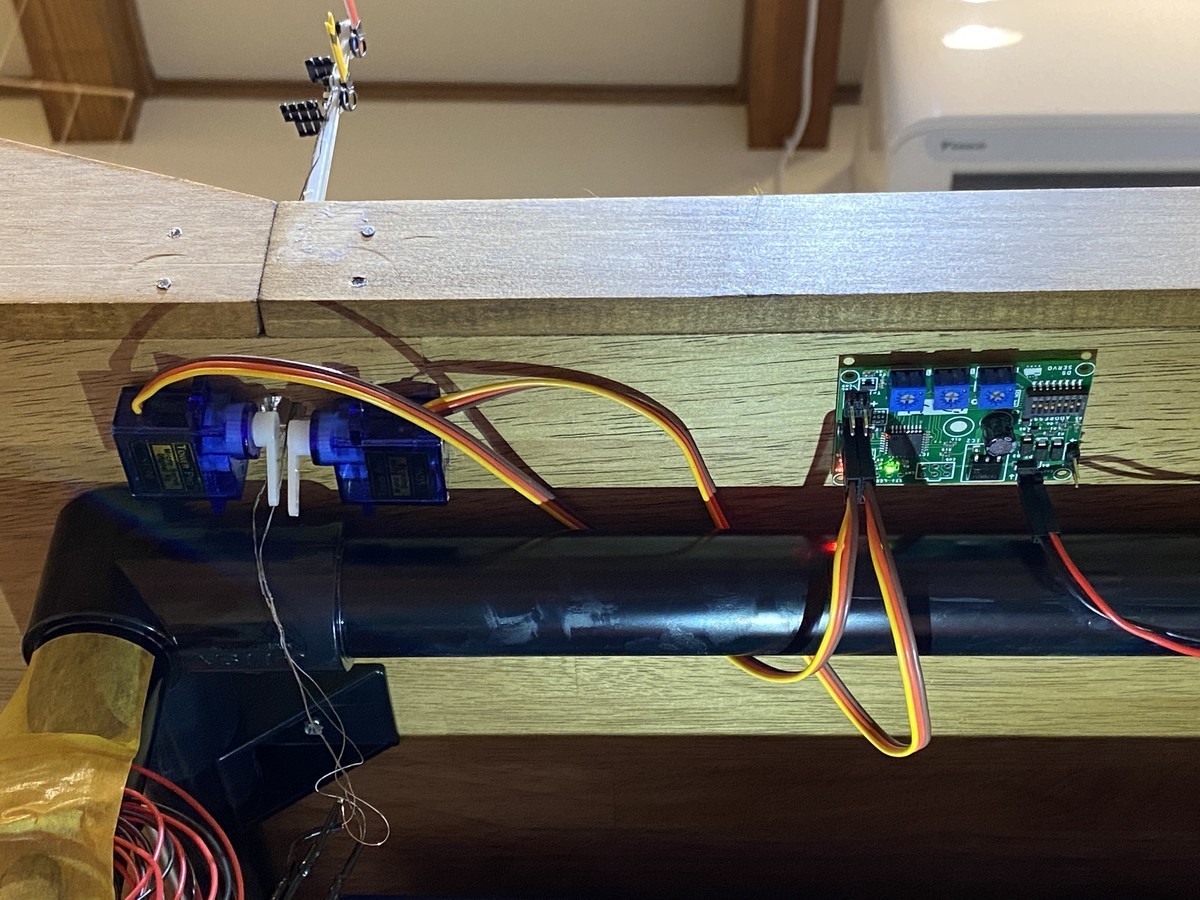
最後に壊れるといけないと思ってとってあった梯子をつけてみました。


ではお披露目を。
The final project of this year has now completed. Added lighting and motorized functions to RATIO semaphore signal kits. How lovely they are! ☺️#TMRGUK pic.twitter.com/DmhC50Xi5D
— じょばんに (@Giovanni_Ihatov) 2020年12月20日
RATIOのキットを買ったのは今年の6月のことなので、構想から半年以上かかってようやく完成に漕ぎ着けることができました。腕木式信号機は、もともとレイアウトを作り始めたころから実現したかったもののひとつで、こうして出来上がったのを見ると感無量です。やはり動きのある仕掛けがレイアウト上にあると全然違うと思います。
もし少しでも気になる方がいらっしゃいましたら、自分のようなビギナーでもできるので、是非とも挑戦してみてください。英国鉄道風景があなたのお部屋にやってくること請け合いです。(おわり)