さて、残りの2両についても順に進めていきます。まずHornbyのex-LMSから。
中央のTail Lampは、ブレーキホースとの干渉を避けるために少しオフセットされた位置に取り付けます。左右のTail Lampは柱の横にかける形です。どちらも取り付け金具がモールドされているので、それに合わせて貼り付けます。
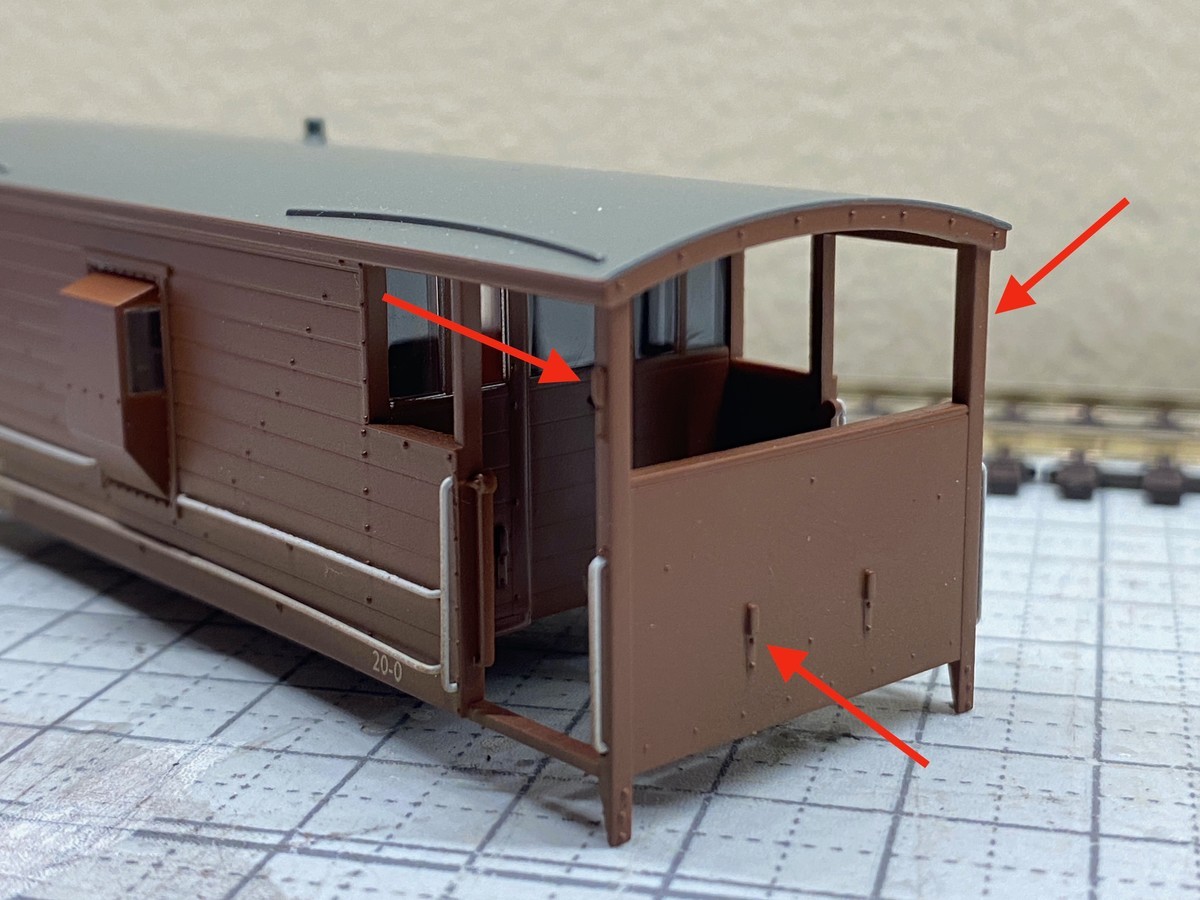

配線は、中央のTail Lampはピンバイスで穴を開けてそのまま床面をまっすぐ室内へ、左右については穴を開けずに柱に這わせる形で床面に下ろし、そこから室内に引き込みます。

この状態で一旦試験点灯。使用した回路は1両目と同じです。

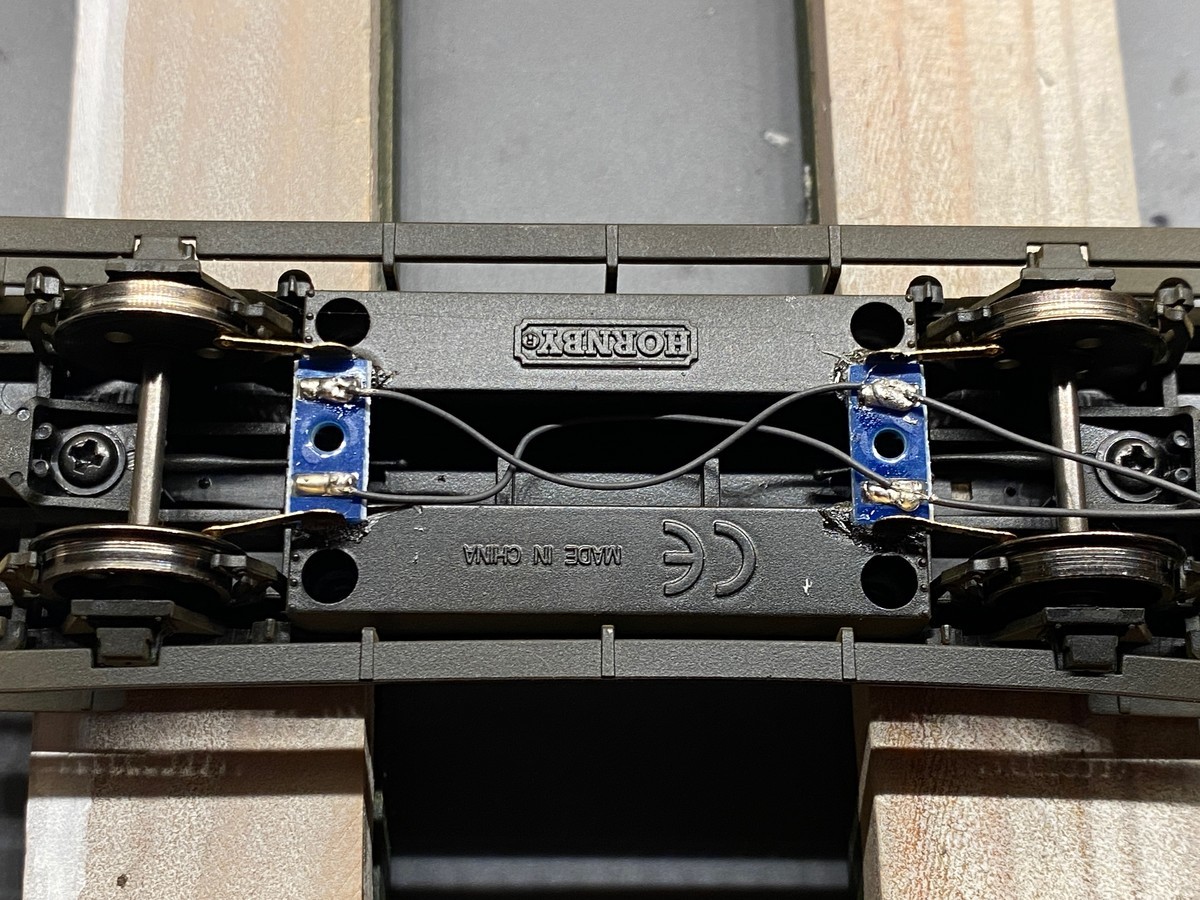
次に電源を取る配線を床下から引き上げます。
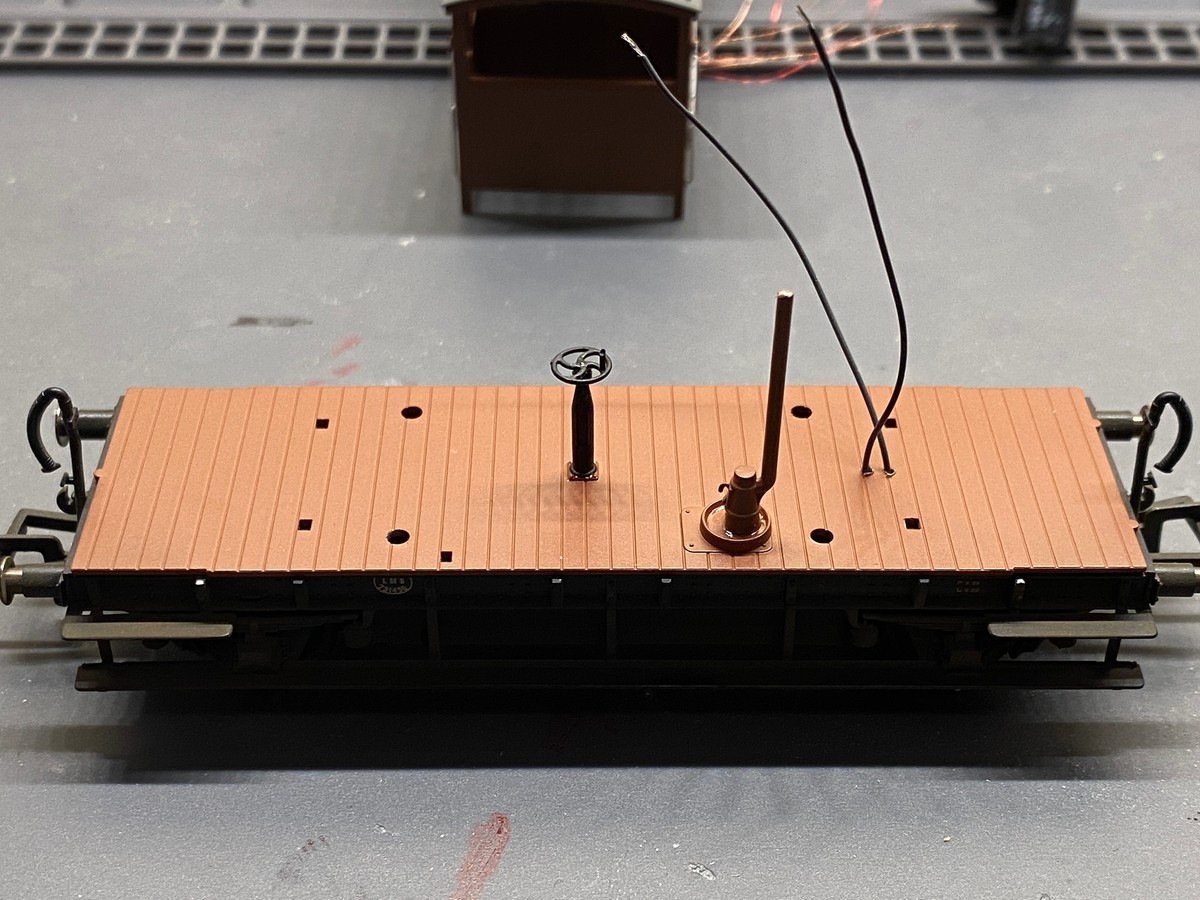
回路につないで、再びボディを被せてねじ止めすれば完成です。

1両目と並べてパチリ。BachmannよりHornbyの方が作りがちゃちい... もとい簡素な分、加工もしやすい印象です。

DCCによる制御
さて3両目、Oxford RailのGWR Toadですが、蒸機へのHead Lampの取り付けを見越して、後学のためにDCCによる制御に挑戦してみることにしました。
まずはLampの取り付けから。今回は3灯のTail Lampに加えて反対側にもう1つTail Lampを設置します。




連結する向きに合わせて、どちら側のTail Lampを点灯させるかファンクションでオン/オフするわけですが、加えて赤灯、白灯を切り替えられるランプを使っているので、なんとかこの機能をうまく使いたい。Webの掲示板などを調べていたところ、白灯にした左右のランプ(Side Lamp)を前方方向(機関士)に対して使う用法があるようです。
- 列車の終端位置を知らせる
- 複数の線路がある場合、列車の入っている線路を知らせる
模型としてやる場合、ランプの向きを変えることはできませんが、連結する向きに合わせて赤灯、白灯切り替えることなら出来そうです。
そこで2つの点灯パターンを考えてみました。写真左が通常の3灯のTail Lamp、写真右が1灯のTail Lampに加えて2灯のSide Lampが前方に向けられているパターンです。

こういう使われ方が正しいのかわからないですが、そこは模型故の制約として勘弁してもらうことにして、先に進みます。
抵抗を載せた配線を集約する基板を以下のように準備しました。左端の水色の囲みが、Common+を入力する場所、そして緑と紫の囲みが、それぞれDCCのAUX1, AUX2を接続する場所です。LEDへの配線はCommon+に陽極、点灯パターンに対応してAUX1もしくはAUX2に陰極を抵抗越しにそれぞれ接続します。

一方、DCCデコーダーですが、今回はlaisdccから購入したNext18デコーダー(860015)とソケット基板(860031)を使いました。自作でDCCデコーダーを利用する場合、このソケット基板が非常に重要な部品です。

裏面のパッドには以下の端子が引き出されています。十分な端子数です。
- Rail L - 線路(L) )RailR
- Rail R - 線路(R)
- M+ - モーター(+)
- M- - モーター(-)
- FL - フロントライト
- RL - リアライト
- VF+ - Common+
- F1 - AUX1
- F2 - AUX2
- F3 - AUX3
- F4 - AUX4
- LS - スピーカー(1)
- LS - スピーカー(2)
- GND - GND
利用する端子に対応するパッドから、配線を引き出します。

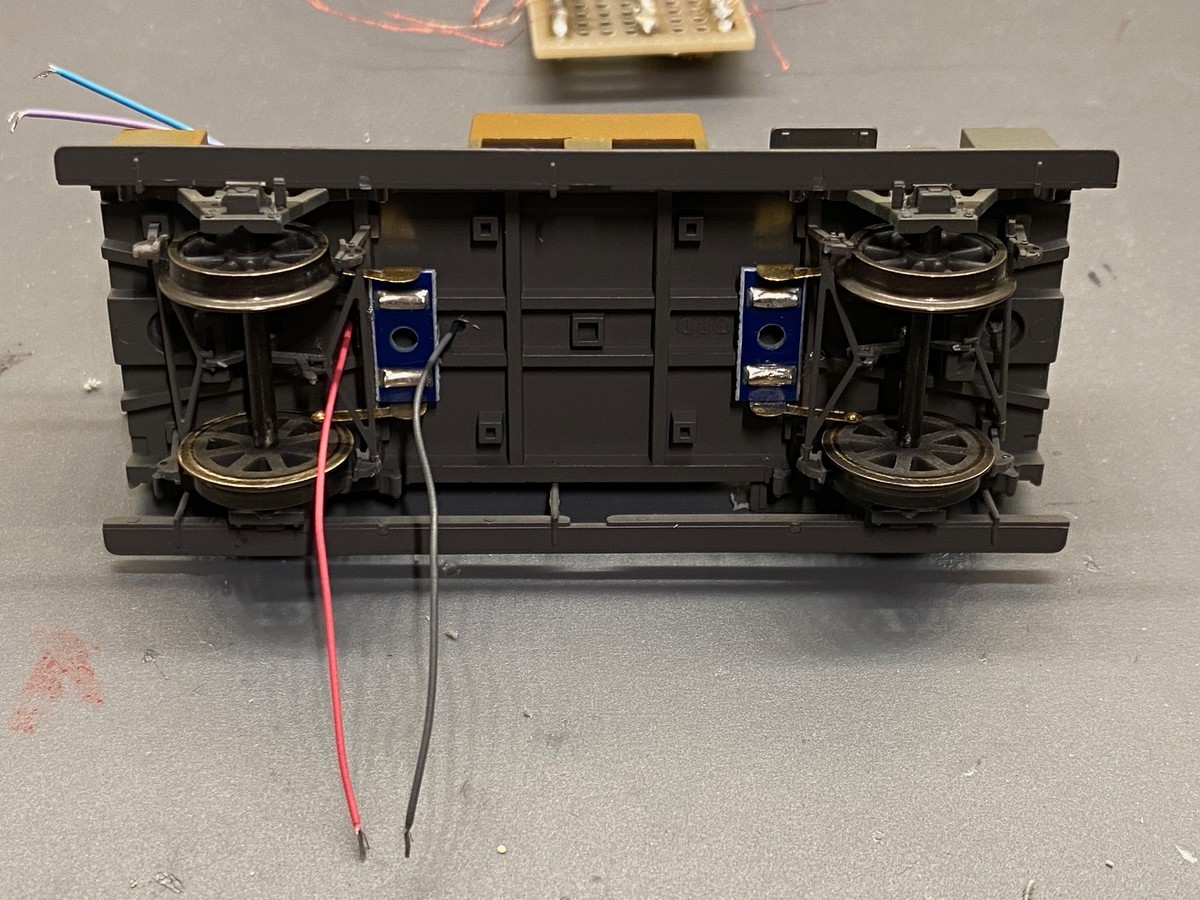
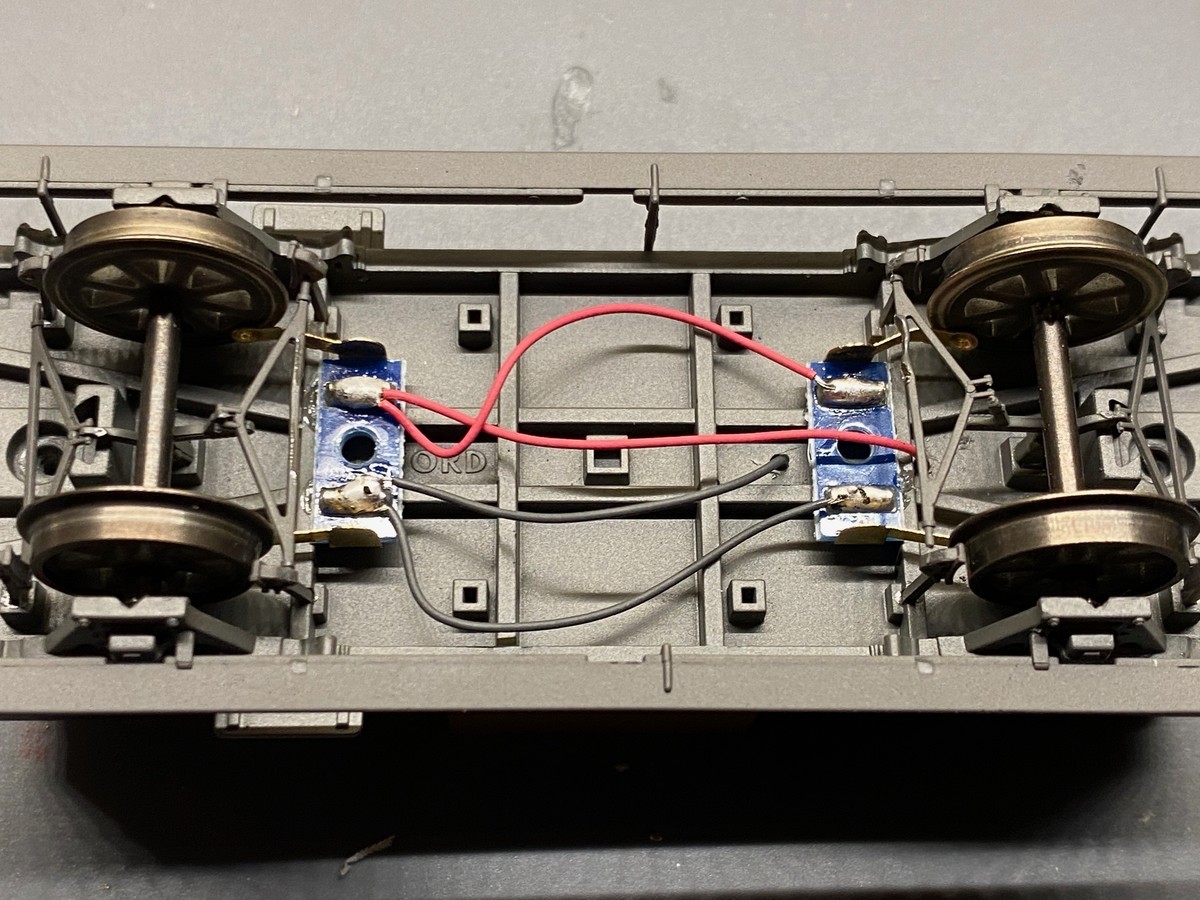
床下の線路電源に配線をつなぎます。床下にもともと入っていたウェイト用金属板に穴を開ける術を持っていなかったので、代わりに板オモリを敷き詰めることにしました。

こんなふうにNext18のソケットができました。ここだけみると美しい...。

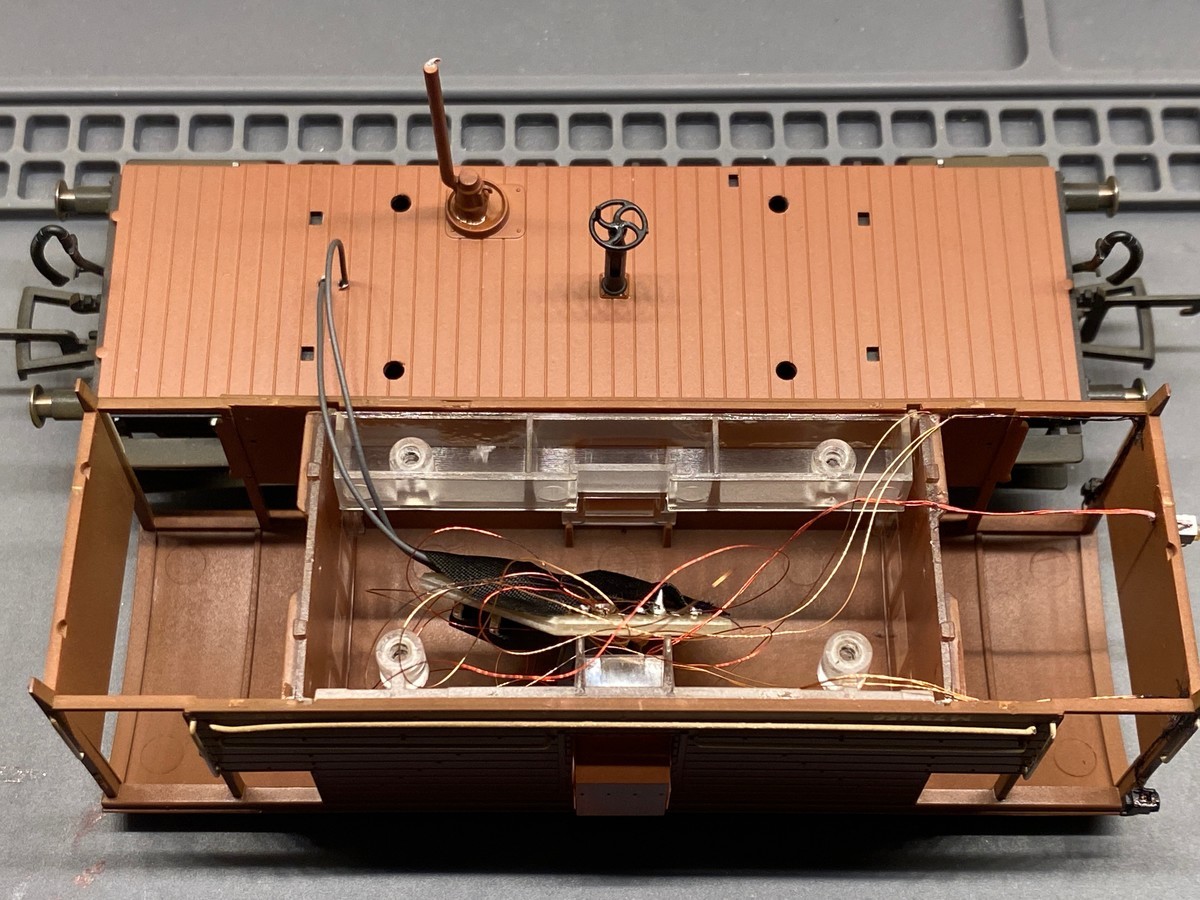
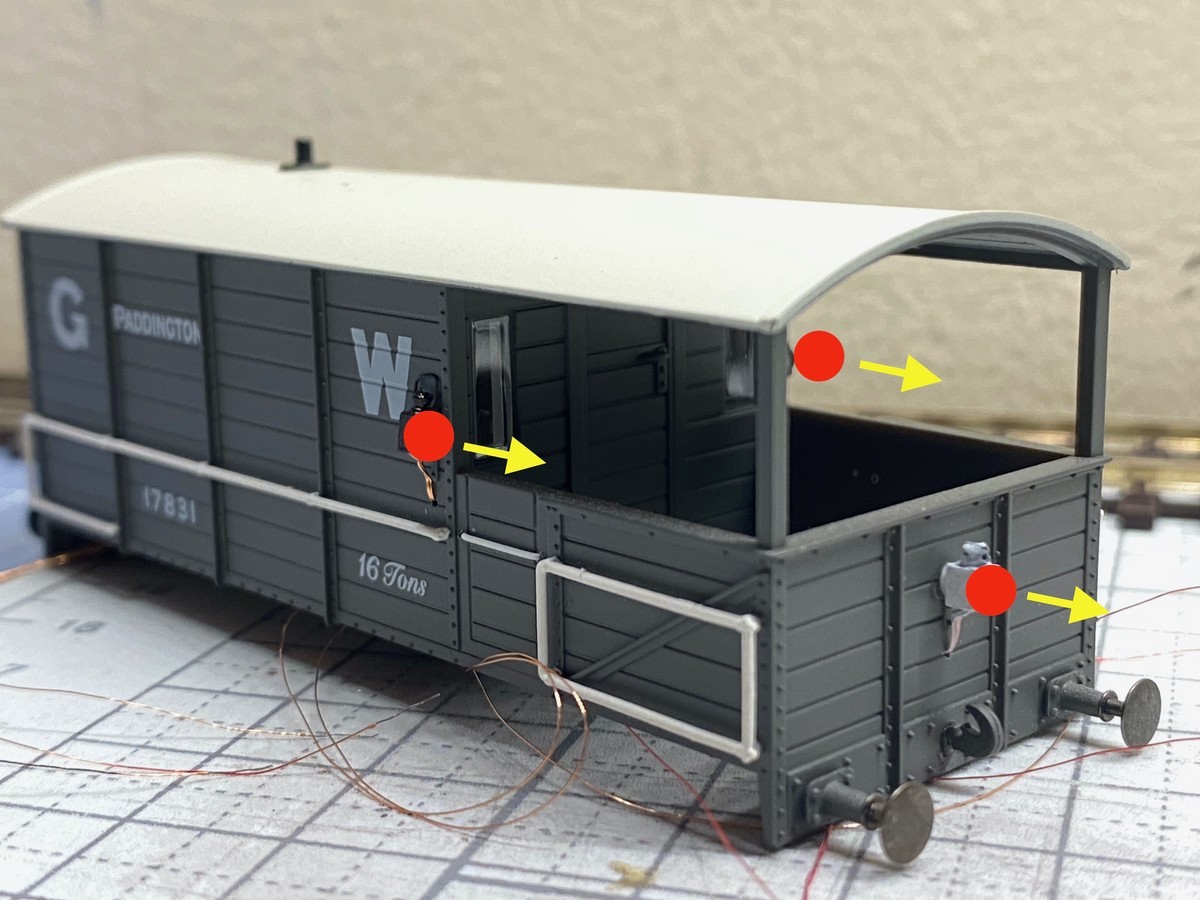
さらにこれに先ほどのLED接続用の回路をつなぎます。これでボディを嵌めれば完成... と思っていたら、トラブル発生。写真左側から室内に延びる配線が、❌の部分と干渉してしまうことがわかりました。

隙間に押し込んでいけるかなとあれこれ試して、なんとかボディを嵌めるところまでできたのですが... 試験点灯させるとそのランプが点かない。あれれと再びボディを開けてみると、無残にもポリウレタン配線が引きちぎれていました...(;_;)

しかたないので、あまりのランプに交換して作業再開。穴開けの位置を干渉しない位置(赤矢印)に変更して、配線の引き回し方も大きく変更(黄矢印)... 最初からこうすればヨカッタ。

というわけで、最終状態。

動作確認は動画でどうぞ。
3両目。作業途中、LEDの線を誤って引きちぎってしまうトラブル😭がありしましたが、なんとか完成しました😌DCCで2パターン点灯できます。 pic.twitter.com/8LdmDSS2Kz
— じょばんに (@Giovanni_Ihatov) 2021年6月6日
本来であれば走行動画も載せたいところですが、実は問題があり... その話はこの次で。
(つづく)